



FE35FB-01000使用手册
本手册适于激光扫描传感器FE35FB-01000

作者:Hinson 发布版本:V1.00 更新时间:2024.10.16
1.1 适用环境注意
 蒸汽、烟雾、尘埃及空气中可见的微粒都可能导致传感器判断错误甚至无法使用。
蒸汽、烟雾、尘埃及空气中可见的微粒都可能导致传感器判断错误甚至无法使用。
需定期安排合格的技术人员检查传感器的连接和安装是否正确。
传感器的最长使用期限为10年,此后须更换,否则可能会达不到所需的性能要求。
传感器应定期检查和清洁。
本产品任何时候都只允许在规定的限制范围内和指定的技术参数及运行条件下使用。
 请勿将电源接反或接入高于限定的最高工作电压,否则将会导致传感器损坏。
请勿将电源接反或接入高于限定的最高工作电压,否则将会导致传感器损坏。
电源接入低于限定的最低工作电压,将会导致传感器无法工作或者工作异常。
请按照手册指导接线,否则传感器可能无法正确检测到输入信号。
输出信号端接入设备请勿超过传感器负载能力,否则将会导致传感器故障。
仅允许具备资格的授权人员连接、安装、调试和设置激光传感器。
确认与传感器关联的外围设备处于可靠停止运行状态。
确认调试人员自身处于安全位置。
确认其他人员或者物体已经处于设备的活动范围外。
| 性能 | |
| 检测距离 | 0.05m-8m(@反射率2%) 0.05m-35m(@反射率90%) |
| 检测角度 | 312° |
| 测量频率 | 540Khz |
| 测量方式 | 脉冲测距技术(PRT) |
| 扫描频率 | 12.5Hz: 750r/min (0.025°、0.05°、0.1°、0.25°、0.5°角度分辨率) 25.0Hz:1500r/min(0.05°、0.1°、0.25°、0.5°角度分辨率) |
| 识别物体形状 | 任意形状,分辨率根据感应距离计算 |
| 测量分辨率 | 1mm |
| 绝对精度 | ±10mm |
| 测量噪声 | ±20mm |
| 接口 | |
| 开关量输入 | 4*NPN |
| 开关量输出 | 4*NPN |
| CAN | Can bus CAN OPEN *1 |
| 以太网 | TCP/IP(TCP 服务器,UDP)100M |
| 回波数 | 3 |
| 输出原始测量数据 | 支持 |
| 区域防护数 | 3 |
| 避障通道数 | 64 |
| 机械/电气 | |
| 工作电压 | DC10~30V |
| 工作电流 | 125-150mA |
| 功耗 | < 3.4W |
| 光源波长 | 905nm |
| 激光等级 | 1类(IEC 60825-1:2014) |
| 指示灯 | 4*LED(工作状态显示灯绿色、输出状态显示灯黄、橙、红) |
| 材质 | 铝合金、PMMA |
| 防护等级 | IP65 |
| 1 | FE 激光传感器 | 1台 |
| 2 | Hinson 配置软件 | 1套 |
| 3 | 传感器合格证 | 1 个 |
| 软件工具 | 软件hinson1.5.2 版本以上 | 1套 |
| 电源 | DC24V 电源 | 1个 |
| 工具 | 电脑配置有RJ45 端口(或通过转换得到) | 1 个 |
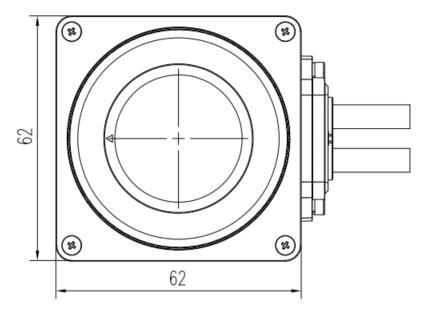
| 序号 | 功能说明 | 备注 |
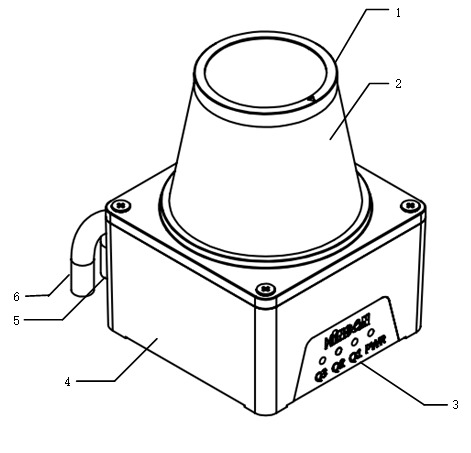
| 1 | 顶壳 | 标注扫描范围和角度位置 |
| 2 | 传感器检测窗口 | 传感器检测窗口 |
| 3 | 指示灯 | 显示工作状态 |
| 4 | 底座 | 安装孔位 |
| 5 | 出线1 | 以太网线连接 |
| 6 | 出线2 | 电源和IO信号线连接 |
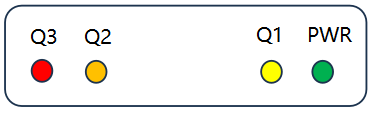
| 标识 | 显示 | 功能说明 | 运行说明 |
| PWR | 绿色 | 工作状态指示灯 | 绿色指示灯 熄灭:传感器未上电或未正常工作; 常亮:传感器工作正常; 闪烁:传感器检测内部故障,停止工作; |
| Q1 | 黄色 | OUT1 输出指示灯 | 黄色指示灯 熄灭:传感器未上电,未检测到物体; 常亮:检测到入侵物体; 闪烁:传感器检测触发边缘; |
| Q2 | 橙色 | OUT2 输出指示灯 | 橙色指示灯 熄灭:传感器未上电,未检测到物体; 常亮:检测到入侵物体; 闪烁:传感器检测触发边缘; |
| Q3 | 红色 | OUT3 输出指示灯 | 红色指示灯 熄灭:传感器未上电,未检测到物体; 常亮:检测到入侵物体; 闪烁:传感器检测触发边缘; |
 | 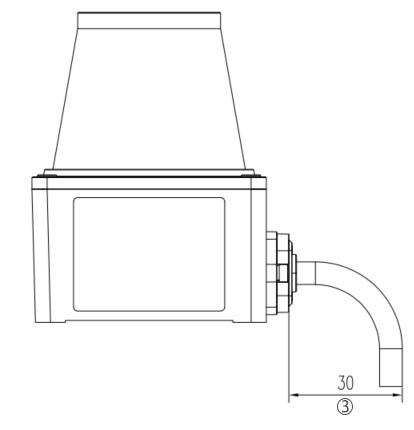 |
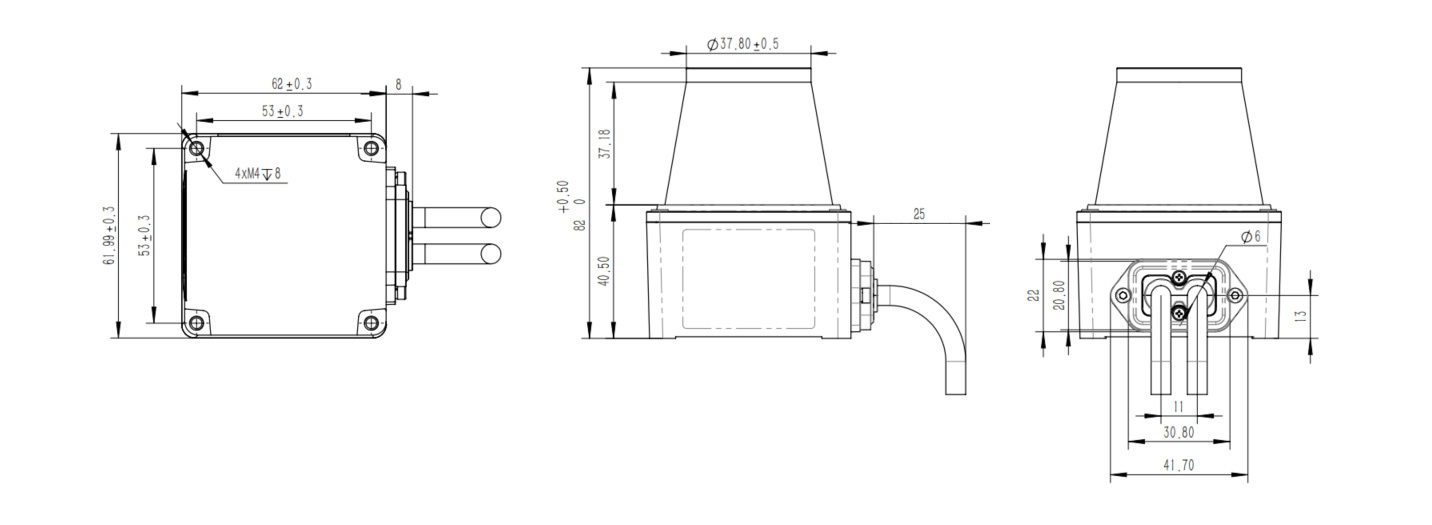
①安装板、②M4螺栓+弹垫+平垫 固定螺丝必须要弹簧垫片防止松动 | ③线缆最小折距弯离 后端部分预留30mm空间用于线缆 |
| 功能 | IO、供电电源、以太网通讯 |
| 类型 | 线材 |
| 端子规格 | RJ45、FT10001-F2H |
| 引脚数量 | 14个引脚 |
| 出线方式 | 直接出线 |
| 端子 | 序号 | 符号 | 颜色 | 功能 |
| CN3 | Pin1 | +VIN | 棕色 | 电源正极输入 |
| Pin2 | -VIN | 蓝色 | 电源负极输入 | |
| Pin3 | XCOM | 棕白色 | 输入公共端 | |
| Pin4 | IN1 | 黑色 | IO输入1 | |
| Pin5 | IN2 | 橙色 | IO输入2 | |
| Pin6 | IN3 | 黄色 | IO输入3 | |
| Pin7 | CAN_L | 绿色 | CAN_L | |
| Pin8 | CAN_H | 紫色 | CAN_H | |
| Pin9 | IN4 | 灰色 | IO输入4 | |
| Pin10 | YCOM | 白色 | 输出公共端 | |
| Pin11 | OUT1 | 白绿色 | IO输出1 | |
| Pin12 | OUT2 | 白蓝色 | IO输出2 | |
| Pin13 | OUT3 | 红色 | IO输出3 | |
| Pin14 | OUT4 | 白红色 | IO输出4 |
| 端子 | 序号 | 符号 | 颜色 | 功能 |
| CN2 | Pin1 | ETH TX+ | 红白色 | 以太网输出+ |
| Pin2 | ETH TX- | 红色 | 以太网输出- | |
| Pin3 | ETH RX+ | 绿白色 | 以太网输入+ | |
| Pin4 | ETH RX- | 绿色 | 以太网输入- |
5.2.1输入信号连接
输入为NPN信号,采用光耦隔离输入。
使用外部的电源:XC0M输入DC24V±20%,100mA以上;
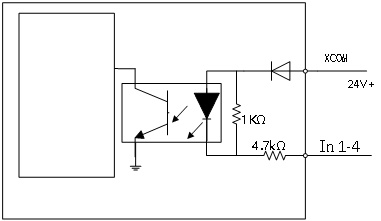
传感器有16个通道,通过4个 IO口输入信号组合,切换到指定编号的通道。通道的检测范围需要预先通过配置软件进行设置。外部设备通过输入信号进行区域选择和切换。

FE传感器提供4个输入端口组合信号。
ON:输入有信号;
0FF:输入无信号或者开路;
通道编号 |
| 通道编号 | IN4 | IN3 | IN2 | IN1 |
| 63 | OFF | OFF | OFF | OFF |
| 62 | OFF | OFF | OFF | ON |
| 61 | OFF | OFF | ON | OFF |
| 60 | OFF | OFF | ON | ON |
| 59 | OFF | ON | OFF | OFF |
| 58 | OFF | ON | OFF | ON |
| 57 | OFF | ON | ON | OFF |
| 56 | OFF | ON | ON | ON |
| 55 | ON | OFF | OFF | OFF |
| 54 | ON | OFF | OFF | ON |
| 53 | ON | OFF | ON | OFF |
| 52 | ON | OFF | ON | ON |
| 51 | ON | ON | OFF | OFF |
| 50 | ON | ON | OFF | ON |
| 49 | ON | ON | ON | OFF |
| 48 | ON | ON | ON | ON |
提醒:如不需要用到全部16个通道,则可以根据所需通道数量确定接入的输入信号
切换时间
传感器在接收到通道切换信号后,由于扫描周期影响存在切换延时。切换延时如下图。
通道切换信号 | 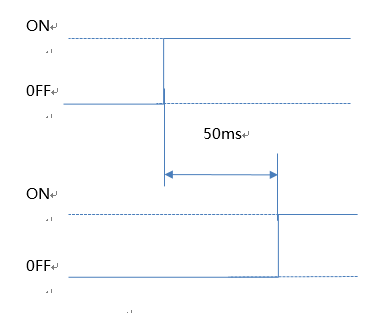 |
实际切换 |
注意 在切换到无图形通道时,传感器将保持之前有图形通道状态监测;
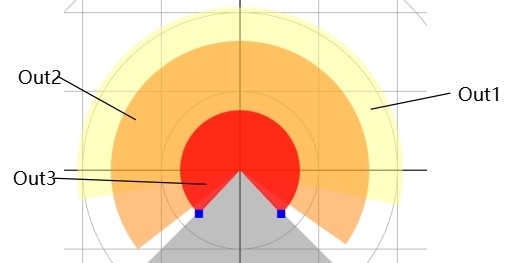
输出信号使用功能
| 端口 | 功能 | 输出逻辑 |
| OUT1 | 用于远端障碍物警告提示和减速; | 默认:常闭,可通过配置软件改为常开; |
| OUT2 | 用于正常障碍物检测正常停止; | 默认:常闭,可通过配置软件改为常开; |
| OUT3 | 用于近端紧急停止; | 默认:常闭,可通过配置软件改为常开; |
| ERR | 用于传感器故障状态输出; | 默认:常开,不可更改; |
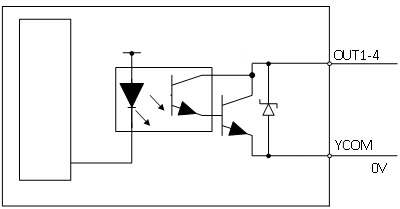
输出为集电极开路(NPN)信号,采用光耦隔离输出,输出有信号时候电压为0V-,
输出端口均为NPN输出。输出原理图请参考下图: 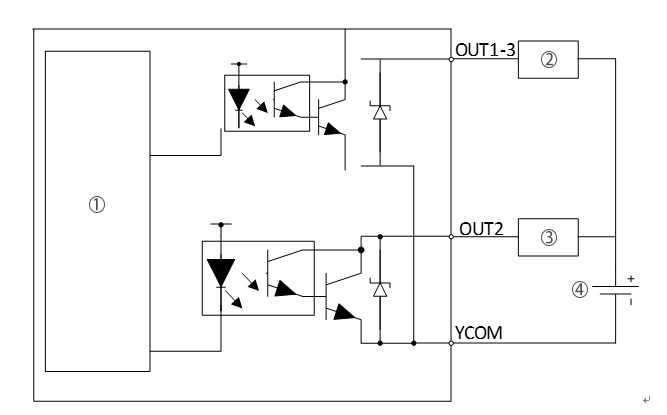 | ||
传感器输出端口与配置软件内绘制的图形对应
| ||
注意:对应输出有绘制图形时,才会有检测输出; | ||
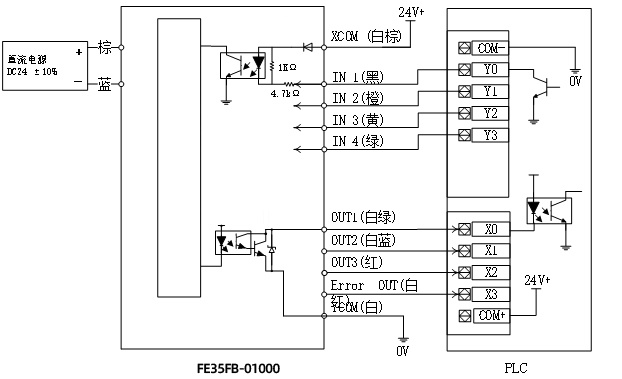
5.2.4连接示意
根据所有的16个通道全部使用上和所有输出全部使用时候的接线。
| |
FE35FB--01000 PLC | |
图是上位机通过NPN管输出信号和接收信号。 | |
X0-X3为PLC的信号输入端口;Y0-Y3为PLC的信号输出端口;IN1-IN4输入电流大于10mA;Out1-Out4输出电流小于100mA; | |
注意:输入输出端口不能短路或者接入超过规定电流的负载,不然会造成传感器损坏。 |
| 直流电源 | 电压 | DC10V-DC30V |
| 电流 | 1A以上 | |
| 计算机 | 系统 | Windows 7以上 |
| 端口 | 配备RJ45接口或配备 USB转RJ45网线接口 | |
| 分辨率 | 1280*720以上 |
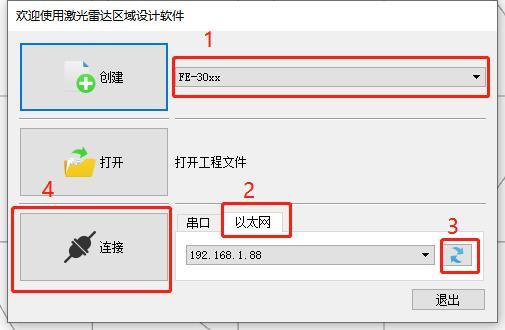
解压配置软件,双击  进入“设备列表”界面后单击
进入“设备列表”界面后单击  进入如下界面:
进入如下界面:
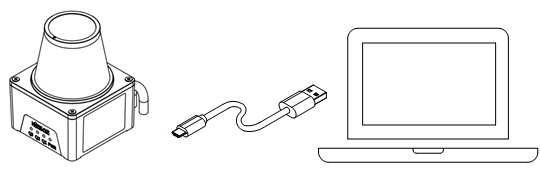
按照如下1、2、3、4步骤连接传感器与配置软件。
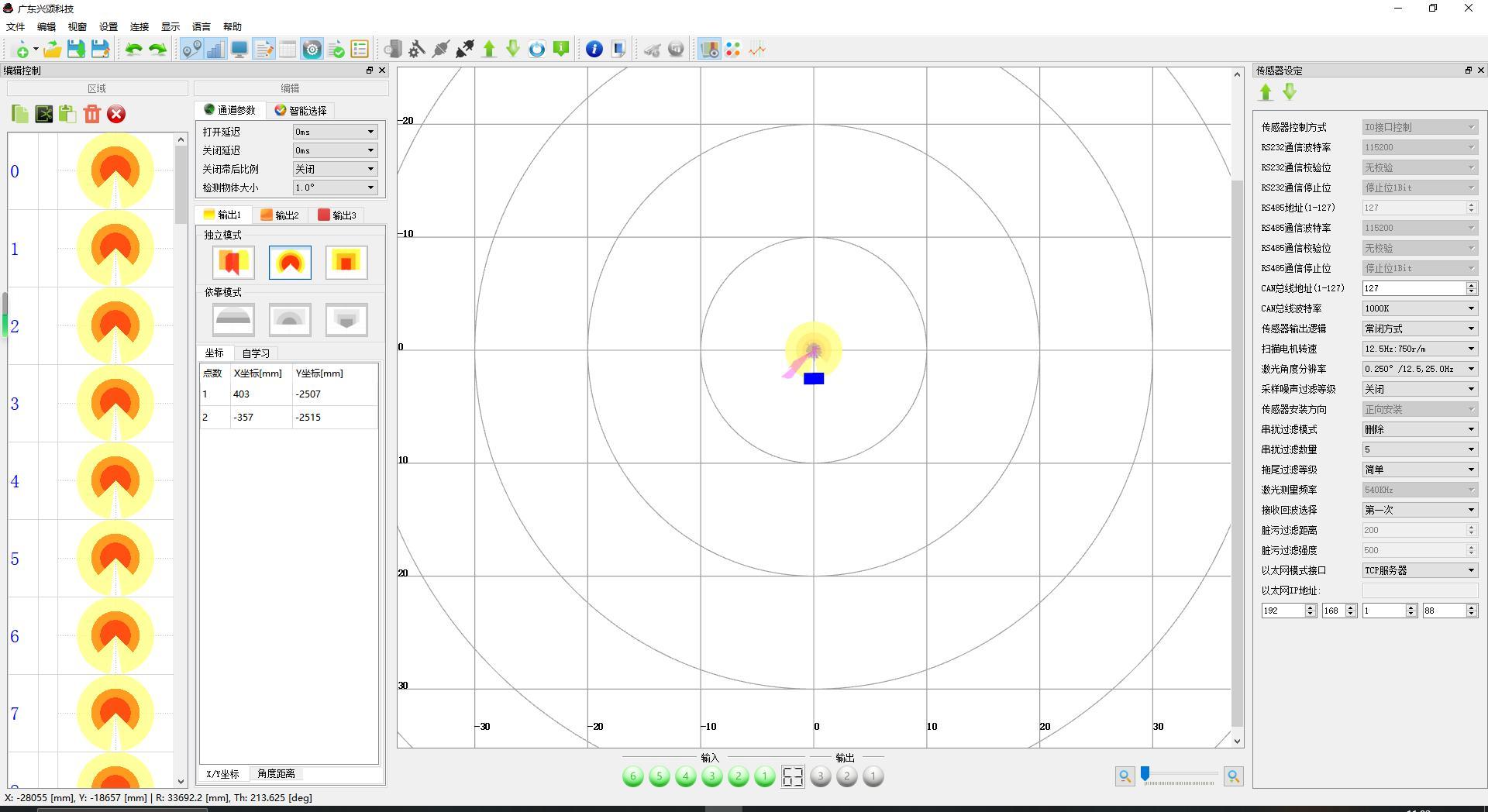
传感器连接上配置软件之后显示如下界面:
一级菜单 | 二级菜单 | 三级菜单 | 对应图标 | 备注 |
|---|---|---|---|---|
文件 | 新建文件 | - | 新建文件 | |
打开文件 | - | 打开已创建的文件 | ||
保存文件 | - | 保存编辑好的文件 | ||
另存为 | - | 将编辑好的文件另存为 | ||
退出 | - | 退出当前配置软件界面 | ||
编辑 | 撤销 | - | 撤销上一步的操作 | |
重做 | - | 恢复上一步的操作 | ||
复制 | - | 复制某一检测通道的检测图形 | ||
剪切 | - | 剪切某一检测通道的检测图形 | ||
粘贴 | - | 将某一检测通道的检测图形粘贴到了另一个通道 | ||
删除 | - | 删除当前选择的检测通道图形 | ||
全部删除 | - | 将所有检测通道图形都删除 | ||
应用设置 | - | - | ||
视窗 | 视窗 | 编辑 | 单击图标配置软件显示编辑功能框 | |
监控 |
| 单击图标配置软件显示监控状态 | ||
传感器设定 | 单击图标配置软件显示传感器参数设定功能框 | |||
输入输出仿真 | 单击图标显示传感器输入输出仿真功能框 | |||
自检状态 | 单击图标显示传感器自检状态 | |||
距离 | - | 单击关闭或显示传感器当前320°范围内扫描轮廓 | ||
强度 | - | 单击关闭或者显示障碍物的反光强度 | ||
数据列表 | - | 配置软件不支持当前所有检测点的距离数据输出,该项不可用 | ||
设置 | 串口 | - | 传感器不支持串口连接配置软件,该项不可用 | |
以太网 | - | 点击选择以太网连接配置软件 | ||
串口设置 | - | 传感器不支持串口连接配置软件,该项不可用 | ||
以太网设置 | - | 点击查看当前传感器以太网地址 | ||
| 接口 | 串口 | 传感器不支持串口连接配置软件,该项不可用 | |
| 以太网 | |||
连接 | 连接设备 | - | 单击连接传感器与配置软件 | |
断开设备 | - | 单击断开传感器与配置软件 | ||
上传数据 | - | 单击上传传感器已设定的检测通道图形以及各项参数 | ||
下载数据 | - | 单击下载检测通道图形以及各项参数 | ||
重启设备 | - | 设定好检测通道图形及其各项参数后,点击此图标对传感器进行重启,参数方可生效 | ||
传感器信息 | - | - | ||
显示 | 图形显示 | - | 单击此图标,传感器320°扫描轮廓以平面图形显示 | |
点云显示 | - | 单击此图标,传感器320°扫描轮廓以点云显示 | ||
线条显示 | - | 单击此图标,传感器320°扫描轮廓以线条显示 | ||
语言 | 简体中文 | - | 单击此图标,配置软件以中文显示 | |
English | - | 单击此图标,配置软件以英文显示 | ||
帮助 | 关于 | - | 单击此图标,配置软件显示版本信息 | |
指南 | - |
6.2.4检测通道图形编辑
传感器支持0-63号检测通道,每个检测通道均支持3个检测区域检测图形输出,传感器可以通过以太网选择通道并输出通道的3个检测区域是否有障碍物入侵。
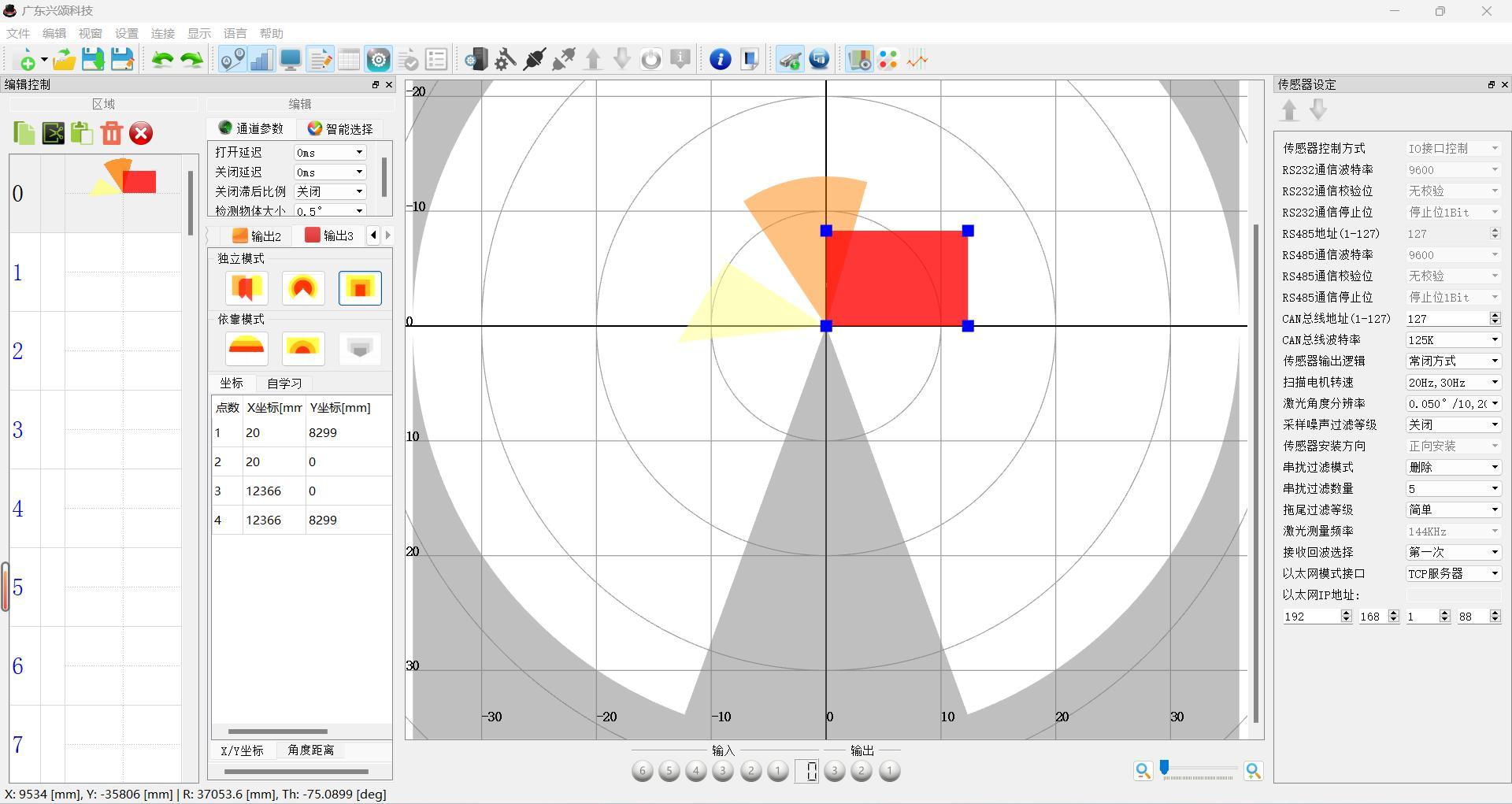
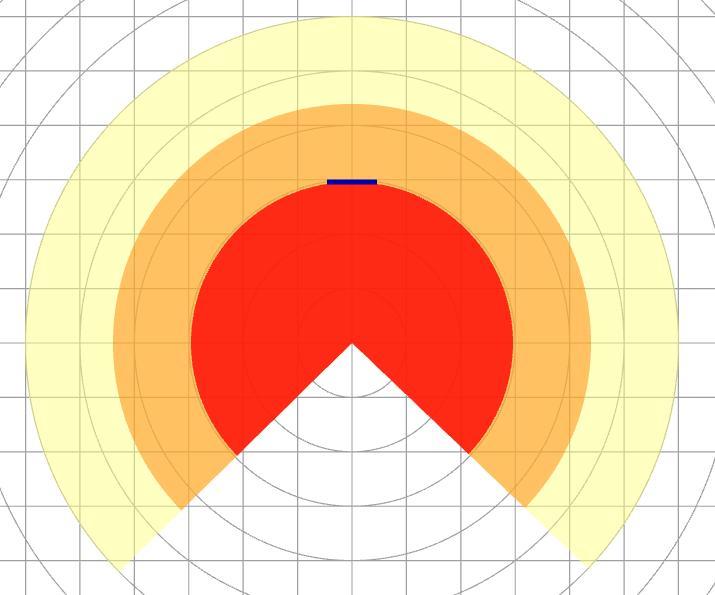
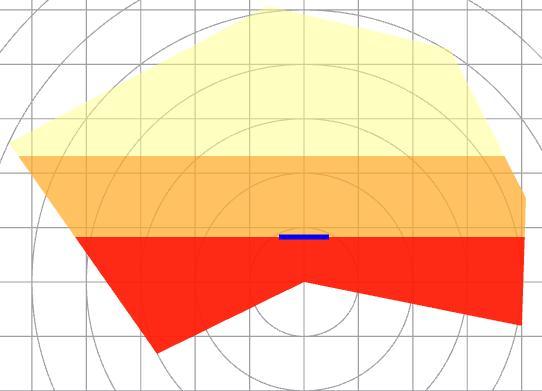
6.2.5输出编辑
通道检测图形输出1、输出2、输出3编辑模式。
独立模式:在独立模式下,可分别设置不规则形状,扇形及其矩形,其中不规则形状最多由100个点的连线构成。
依靠模式:在设定好输出1的图形后,可以选择依靠模式按照不同比例复制输出1的图形。
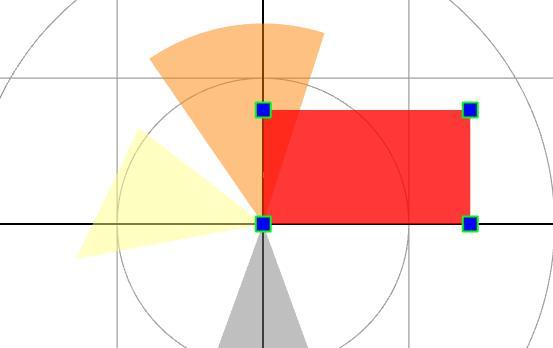
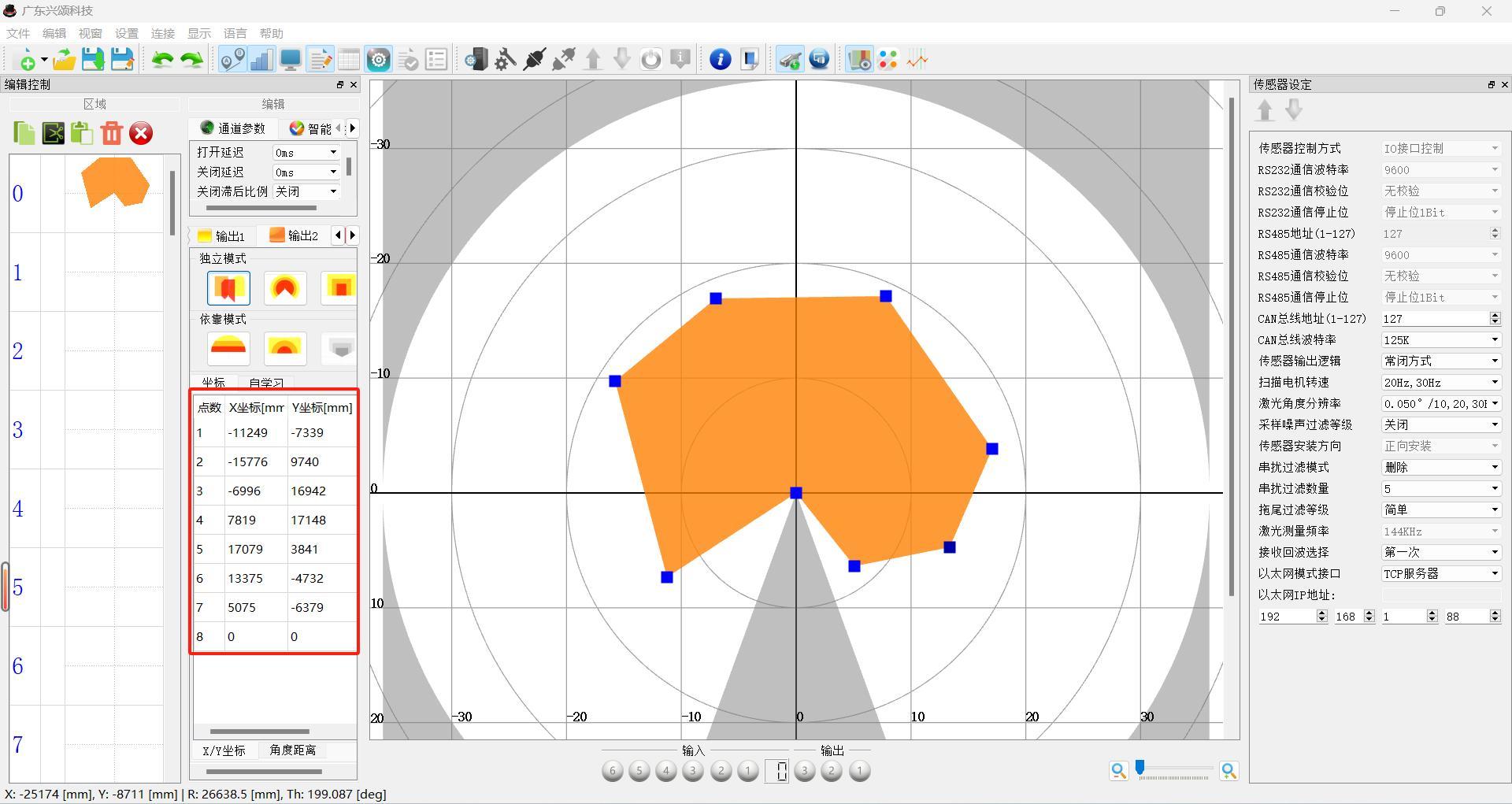
6.2.6 坐标及其角度值
独立模式下不规则图形各点的坐标(X、Y):
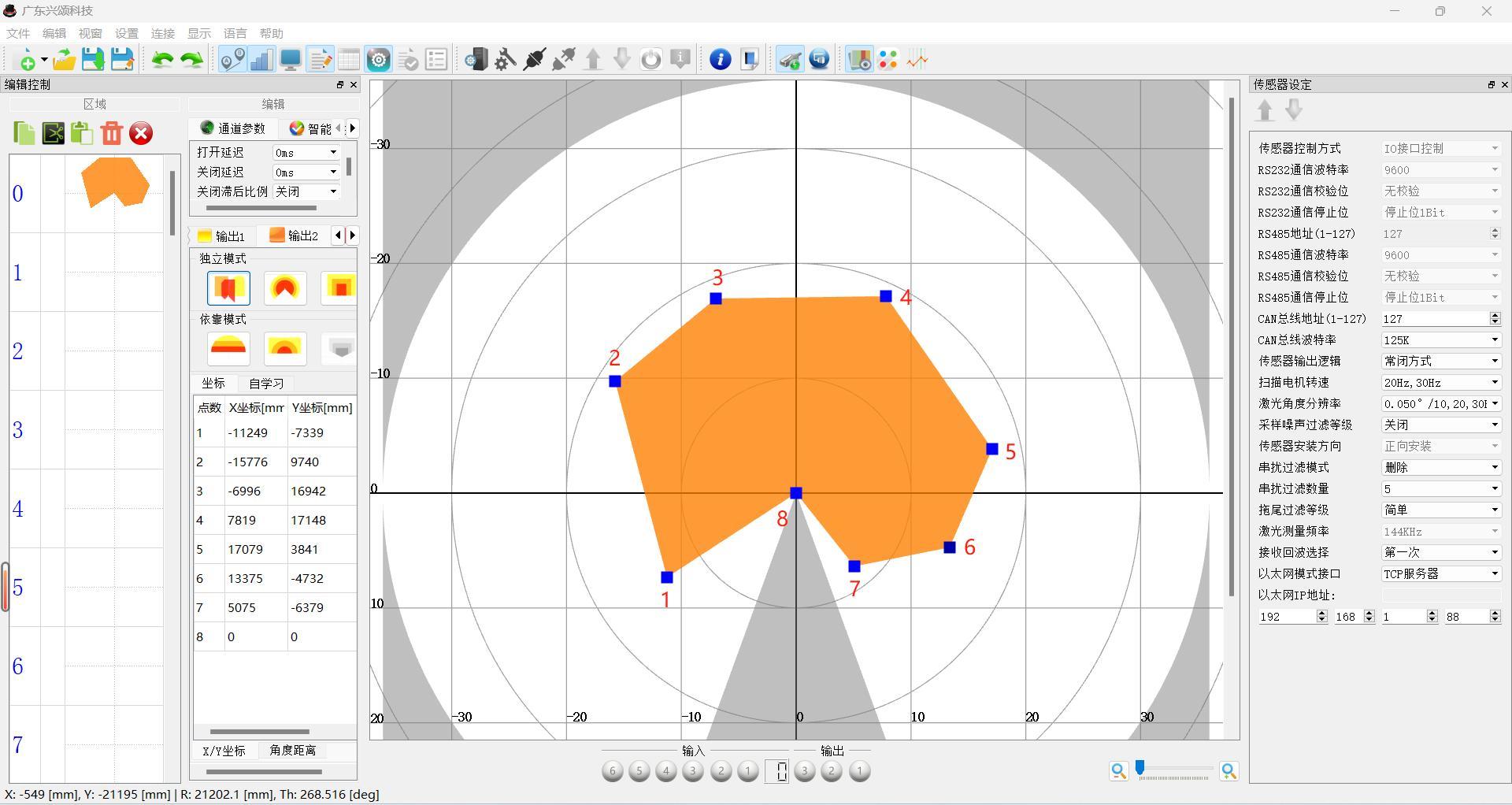
备注:第8点为坐标原点
独立模式下不规则形状各点与坐标原点的距离及其角度:
备注:第8点为坐标原点
6.2.7扫描状态显示
扫描轮廓、反光强度、检测通道图形 显示区域
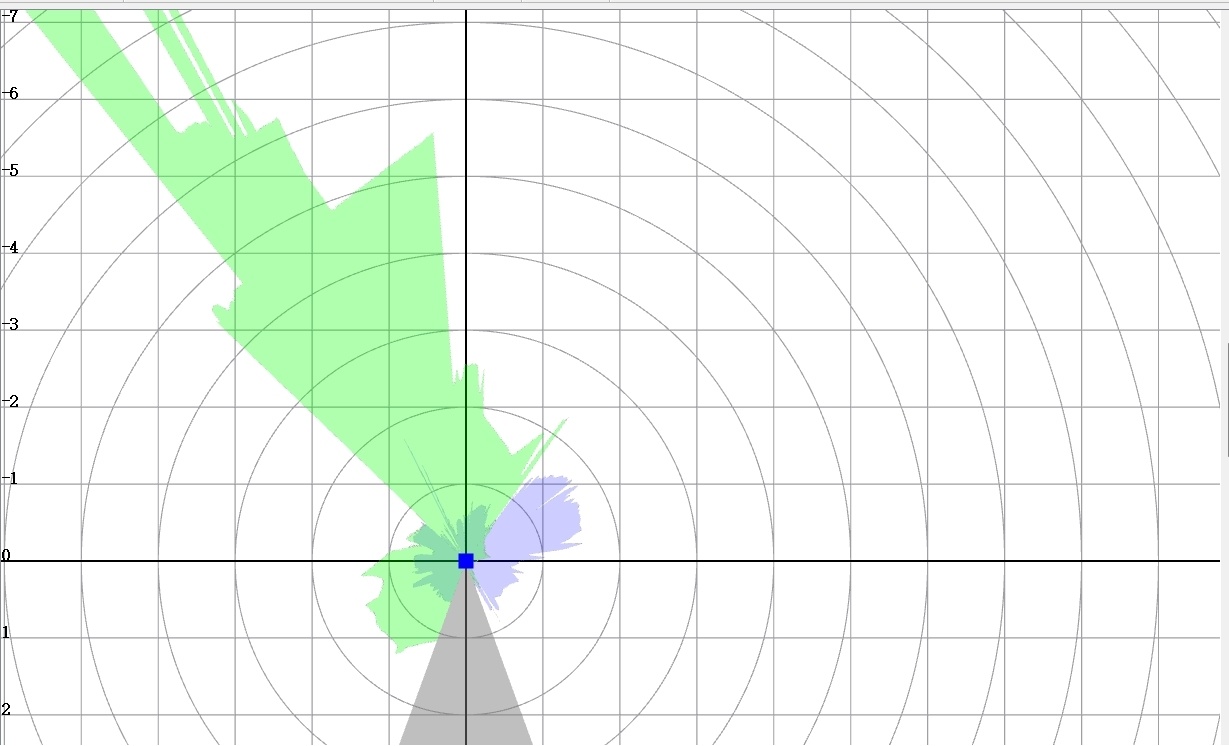
备注:1绿色线条所示的是扫描轮廓、2蓝色线条所示的是反光强度。
- 4个开关量输入和2个开关量输出
- 4个开关量输入选择检测48-63通道(也可以通过以太网指定所选择的通道)
- 2个开关量分别输出1和输出3的状态信号。
| 参数列表 | 参数值 | 备注 |
|---|---|---|
| 传感器控制方式 | IO接口控制 | 输入选择传感器通道时IO、Modbus、Canopen三选一,同一时刻只能一种有效,输出时IO一直有效 |
| Modbus通讯控制 | 输入选择传感器通道时IO、Modbus、Canopen三选一,同一时刻只能一种有效,输出时IO一直有效,选定Modbus通讯控制时,Modbus输出有效 | |
| Canopen通讯控制 | 输入选择传感器通道时IO、Modbus、Canopen三选一,同一时刻只能一种有效,输出时IO一直有效,选定Canopen通讯控制时,Canopen输出有效 | |
| RS485地址(1-127) | 1-127 | RS485通讯地址1-127可设定 |
| RS485通讯波特率 | 9600bps | RS485通讯波特率的设定 |
| 19200bps | ||
| 38400bps | ||
| 57600bps | ||
| 115200bps | ||
| RS485校验位 | 无校验 | RS485校验码的设定 |
| 奇校验 | ||
| 偶校验 | ||
| RS485通讯停止位 | 停止位1Bit | RS485停止位的设定 |
| 停止位1.5Bit | ||
| 停止位2Bit | ||
| CAN总线地址(1-127) | 1-127 | CAN通讯地址1-127可设定 |
| CAN总线波特率 | 125K | CAN总线波特率 |
| 250K | ||
| 500K | ||
| 1000K | ||
| 传感器输出逻辑 | 常开方式 | 传感器输出常开、常闭设定 |
| 常闭方式 | ||
| 激光角度分辨率 | 0.025°/12.5HZ 0.050°/12.5,25HZ 0.100°/12.5,25,50HZ 0.200°/50HZ 0.250°/12.5,25HZ 0.500°/12.5,25,50HZ | 默认分辨率0.250° |
| 噪声过滤等级 | 关闭 简单 中等 严格 | 噪声过滤等级设定,默认为关闭 |
| 传感器安装方向 | 正向安装 | 参数目前未生效 |
| 串扰过滤模式 | 关闭 拟合 删除 | 默认删除。 开启防其它传感器干扰功能 |
| 串扰过滤数量 | 3-8 | 默认5,过滤点数量,过滤点越多抗扰效果越好,但是图像会存在一定边缘部分的失真 |
| 拖尾过滤等级 | 关闭 简单 中等 严格 | 拖尾过滤等级设定,默认为简单 |
| 激光测量频率 | 540KHz | 传感器测量频率,参数目前无法修改 |
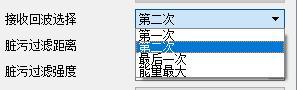
| 接收回波选择 | 第一次 第二次 最后一次 能量最大 | 第一次:正常模式,无过滤功能 第二次:选择第二次回波,有过滤功能 最后一次:选择最后一次回波,有过滤功能 能量最大:选择回波能量最大,有过滤功能 默认为第一次 |
| 脏污过滤距离 | 0-2000 | 脏污过滤距离设定,默认为200 |
| 脏污过滤强度 | 0-2000 | 脏污过滤距离设定,默认为200 |
| 以太网模式接口 | TCP服务器 | 默认TCP服务器 |
| UDP模式 | ||
| 以太网IP地址 | 传感器IP地址的设定 |
| |
| 第一次 | 正常模式,无过滤功能 |
| 第二次 | 选择第二次回波,有过滤功能(回波功能建议选项) |
| 最后一次 | 选择最后一次回波,有过滤功能 |
| 能量最大 | 接收回波能量最大 |
| 注意:在有多个激光的情况下,使用多次回波功能,并且串扰过滤模式选择删除,就会在图像上呈现小部分点云消失的情况。请勿同时使用上述功能。 | |
|
|
|
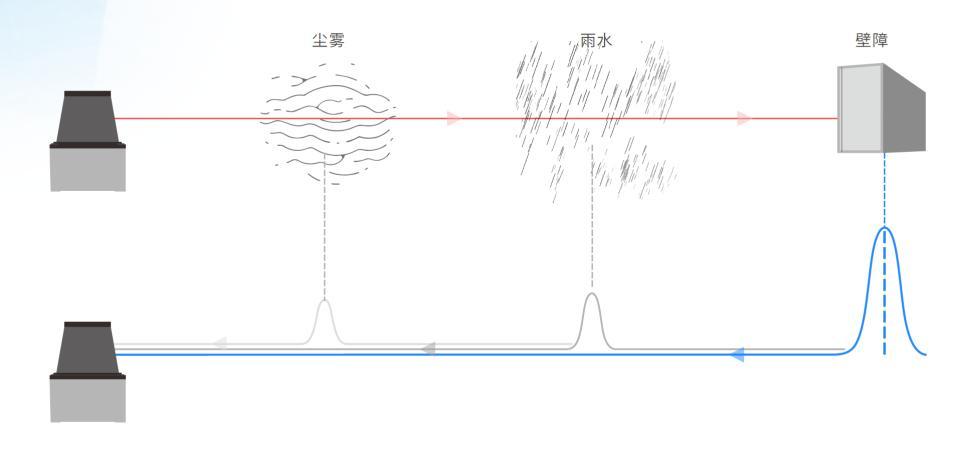
多重回波技术可检测每个测量光束的多个回波信号,如此即可识别发射光束运行周期中途的雨水或者尘雾、复杂结构物体等造成的回波,并在必要时进行过滤抑制。
为了能够将回波显示为单独的测量值,两个物体之间必须有大约2.5m的最小间距。
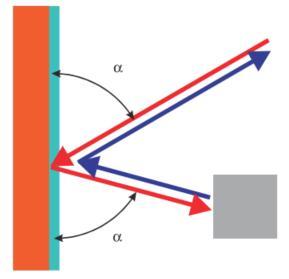
● 光滑反光表面
无法检测光滑反光表面,但可以检测被光滑反光表面的反射光照射到的物体
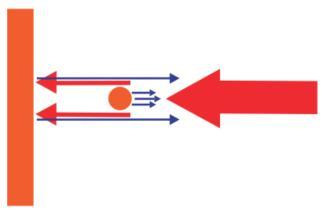
● 检测小物体或无物体
若被检测物体是小于光束直径的小物体,则有可能
①小物体表面反光不足,且无背景物体,则无法被检测;
②小物体反光不足,背景物体反光足够,则检测错误;
③小物体与背景物体反光均足够,则测量值失真;
◆参数设置
打开配置软件,进入传感器(服务器端)设定界面,设置以下参数。
| 参数名称 | 参数值 | 默认值 |
| 以太网模式 | TCP服务器 | TCP服务器 | |
| UDP模式 | |||
| 以太网IP地址 | 192.168.1.1-254 最后一个字节1-254可设置 传感器(服务器)端口固定为8080 | 192.168.1.88 |

在客户端发起请求并建立连接后,开始数据传输,传输方式为以下规则:
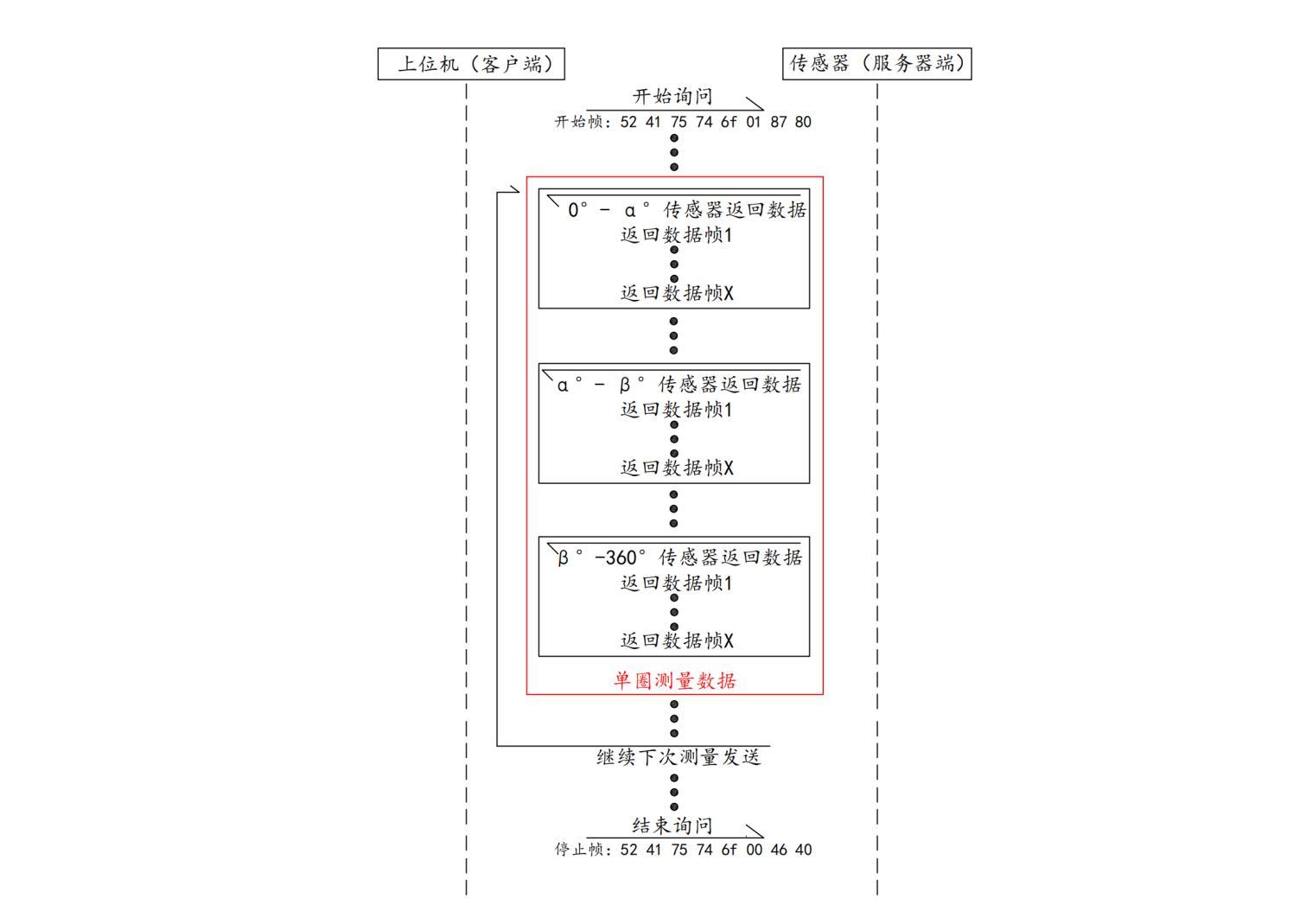
上位机(客户端)向传感器(服务器端)发送“开始数据帧”,传感器分若干帧返回0°- 360°的测量数据,当返回完整的0°- 360°一共360°的测量数据后,传感器继续下一次的测量数据发送,直到传感器接收到上位机发出的“停止数据帧”为止。
- 开始数据帧(Hex)
数据结构
| 起始码 | 控制位 | 校验位 |
| 5Byte | 1Byte | 2Byte |
起始码:固定数据为0x52 0x41 0x75 0x74 0x6F
控制位:
0x01传感器开始自动发送数据;
0x00 传感器停止发送数据;
校验位:低位在前,高位在后,使用Modbus-CRC16计算方式算出的校验位。
- 测量数据帧(Hex)
数据结构:
| 数据帧头 | 测量数据 |
| 16Byte | 长度不固定 |
数据帧头格式(Hex):
| 标识符 | 1Byte |
| 1Byte | |
| 1Byte | |
| 1Byte | |
| 起始角度 | 1Byte(高位在前) |
| 1Byte(低位在后) | |
| 结束角度 | 1Byte(高位在前) |
| 1Byte(低位在后) | |
| 当前数据帧总测量点数 | 1Byte(高位在前) |
| 1Byte(低位在后) | |
| 当前数据帧最后检测点的顺序编号 | 1Byte(高位在前) |
| 1Byte(低位在后) | |
| 起始角度至结束角度范围内总测量点数 | 1Byte(高位在前) |
| 1Byte(低位在后) | |
| 时间标志 | 1Byte(高位在前) |
| 1Byte(低位在后) |
1、标识符(4Byte):0x48 0x49 0x53 0x4e
2、起始角度(2Byte):当前返回测量数据的起始角度;
3、结束角度(2Byte):当前返回测量数据的结束角度;
4、当前数据帧总测量点数(2Byte):
由于角度分辨率不同,在起始角度至结束角度范围内测量总点数也会不同,在起始角度至结束角度范围内会分若干数据帧返回测量数据,“当前数据帧总测量点数”就是当前数据帧返回测量点数的总和。
5、当前数据帧最后检测点的顺序编号(2Byte):
举例说明:起始角度至结束角度范围内总测量点数为800,分2帧返回测量数据,当前数据帧返回的是第1到第400个点的数据,那么“当前数据帧最后检测点的顺序编号”的数值为400,若当前数据帧返回的是第401到第800个点的数据,那么“当前数据帧最后检测点的顺序编号”的数值为800。
6、起始角度至结束角度范围内总测量点数(2Byte):
起始角度至结束角度范围内总测量点数由当前的“激光扫描频率”、“扫描电机转速”、“单点采样
次数”来确定,以下会举例说明。
7、时间标志(2Byte):
显示当前帧发送内部计时时间,时间单位us,时间记录范围0-65535us,记录满后数据清零。
测量数据(Hex):
| 第一个点测量数据(4Byte) | 第二个点测量数据(4Byte) | …………………(4Byte) | 最后一个点测量数据(4Byte) | ||||||||||||
| 测量距离(2Byte) | 测量强度(2Byte) | 测量距离(2Byte) | 测量强度(2Byte) | 测量距离(2Byte) | 测量强度(2Byte) | 测量距离(2Byte) | 测量强度(2Byte) | ||||||||
| L | H | L | H | L | H | L | H | L | H | L | H | L | H | L | H |
测量距离的单位为mm,输出的是反射点与传感器的距离数据。
测量强度为反射点反光强度体现,值越高,代表物体反射能力越强。
测量距离与测量强度均是低位在前高位在后。
- 停止数据帧(Hex)
0x52 0x41 0x75 0x74 0x6F 0x00 0x46 0x40
上位机向传感器发送停止数据帧后,传感器停止返回测量数据。
- 举例说明
1.传感器参数设定如下:
以太网模式接口:TCP服务器
以太网IP地址:192.168.1.88
扫描电机转速:12.5HZ
传感器(服务器)端口:8080
需要特别注意的是传感器(服务器)端口固定为8080,上位机与传感器建立连接成功。
2.测量角度分辨率的计算:
激光扫描频率:激光发射管1秒钟发射激光束的数量,以下以432KHZ为例;
扫描电机转速:带动激光发射管旋转电机1秒钟转动的圈数,以下以12.5HZ(1秒钟旋转12.5r)为例;
单点采样次数:单个测量点重复测量的次数。以下以单个检测点测量1次为例;
测量角度分辨率=扫描电机转速*360°/(激光扫描频率/单点采样次数)=0.100°,测量角度分辨率由配置软件自动算出,不需要另行设置;
3.测量总点数的计算:
测量总点数=(结束角度-起始角度)/测量角度分辨率,测量总点数小数点后一位四舍五入,按照传感器的设计,分为13个角度范围数据块,此角度范围值为固定值,不随角度分辨率的变化而变化。具体看下图4.
| 第一个起始角度 | 第一个结束角度 | 角度范围 | 第二个起始角度 | 第二个结束角度 | 角度范围 | 第三个起始角度 | 第三个结束角度 | 角度范围 | 第四个起始角度 | 第四个结束角度 | 角度范围 |
| 24° | 48° | 24° | 48° | 72° | 24° | 72° | 96° | 24° | 96° | 120° | 24° |
| 第五个起始角度 | 第五个结束角度 | 角度范围 | 第六个起始角度 | 第六个结束角度 | 角度范围 | 第七个起始角度 | 第七个结束角度 | 角度范围 | 第八个起始角度 | 第八个结束角度 | 角度范围 |
| 120° | 144° | 24° | 144° | 168° | 24° | 168° | 192° | 24° | 192° | 216° | 24° |
| 第九个起始角度 | 第九个结束角度 | 角度范围 | 第十个起始角度 | 第十个结束角度 | 角度范围 | 第十一个起始角度 | 第十一个结束角度 | 角度范围 | 第十二个起始角度 | 第十二个结束角度 | 角度范围 |
| 216° | 240° | 24° | 240° | 264° | 24° | 264° | 288° | 24° | 288° | 312° | 24° |
| 第十三个起始角度 | 第十三个结束角度 | 角度范围 | |||||||||
| 312° | 336° | 24° |
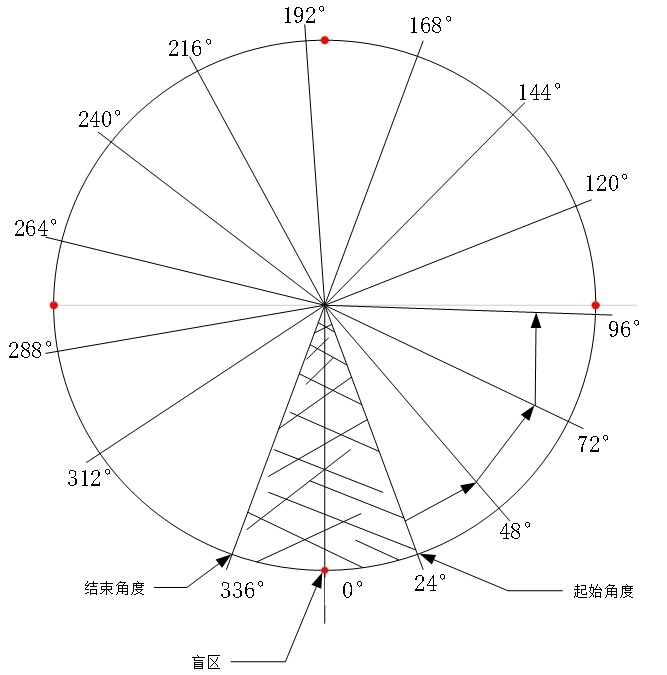
以结束角度24°、起始角度0°、角度分辨率0.100°为例,测量总点数=(24-0)/0.100=240。
4.数据解析:
0°-24°范围内返回数据帧1,当前返回第1-第240个点(共计240个点)的距离及其反光强度数据,解析如下:
| 标识符 | 0x48 | 4Byte | |
| 0x49 | |||
| 0x53 | |||
| 0x4e | |||
| 起始角度 | 0x00 | H(高位在前) | 2Byte |
| 0x00 | L(低位在后) | ||
| 结束角度 | 0x00 | H(高位在前) | 2Byte |
| 0x18 | L(低位在后) | ||
| 当前数据帧总测量点数 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 当前数据帧最后检测点的顺序编号 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 起始角度至结束角度范围内总测量点数 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 时间标志 | 0xDF | H(高位在前) | 2Byte |
| 0x4C | L(低位在后) | ||
| 第1个检测点距离 | 0x xx | L(低位在前) | 每个点的检测距离用2Byte表示,每个点的反光强度用2Byte表示,该数据帧一共返回240个点,所以该部分总字节数为240*4=960Byte |
| 0x xx | H(高位在后) | ||
| 第1个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第2个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第2个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
↓ ↓ | |||
| 第239个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第239个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第240个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第240个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
24°-48°范围内返回数据帧2,当前返回第241-第480个点(共计240个点)的距离及其反光强度数据,解析如下:
| 标识符 | 0x48 | 4Byte | |
| 0x49 | |||
| 0x53 | |||
| 0x4e | |||
| 起始角度 | 0x00 | H(高位在前) | 2Byte |
| 0x18 | L(低位在后) | ||
| 结束角度 | 0x00 | H(高位在前) | 2Byte |
| 0x30 | L(低位在后) | ||
| 当前数据帧总测量点数 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 当前数据帧最后检测点的顺序编号 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 起始角度至结束角度范围内总测量点数 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 时间标志 | 0xF4 | H(高位在前) | 2Byte |
| 0x15 | L(低位在后) | ||
| 第241个检测点距离 | 0x xx | L(低位在前) | 每个点的检测距离用2Byte表示,每个点的反光强度用2Byte表示,该数据帧一共返回240个点,所以该部分总字节数为240*4=960 Byte |
| 0x xx | H(高位在后) | ||
| 第241个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第242个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第242个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 0x xx | H(高位在后) | ||
↓ ↓ | |||
| 第479个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第479个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第480个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第480个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
48°-72°范围内返回数据帧3,当前返回第481-第720个点(共计240个点)的距离及其反光强度数据,解析如下:
| 标识符 | 0x48 | 4Byte | |
| 0x49 | |||
| 0x53 | |||
| 0x4e | |||
| 起始角度 | 0x00 | H(高位在前) | 2Byte |
| 0x30 | L(低位在后) | ||
| 结束角度 | 0x00 | H(高位在前) | 2Byte |
| 0x48 | L(低位在后) | ||
| 当前数据帧总测量点数 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 当前数据帧最后检测点的顺序编号 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 起始角度至结束角度范围内总测量点数 | 0x00 | H(高位在前) | 2Byte |
| 0xF0 | L(低位在后) | ||
| 时间标志 | 0x08 | H(高位在前) | 2Byte |
| 0xFC | L(低位在后) | ||
| 第481个检测点距离 | 0x xx | L(低位在前) | 每个点的检测距离用2Byte表示,每个点的反光强度用2Byte表示,该数据帧一共返回240个点,所以该部分总字节数为240*4=960Byte |
| 0x xx | H(高位在后) | ||
| 第481个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第482个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第482个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 0x xx | H(高位在后) | ||
↓ ↓ | |||
| 第719个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第719个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第720个检测点距离 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
| 第720个检测点反光强度 | 0x xx | L(低位在前) | |
| 0x xx | H(高位在后) | ||
传感器状态和区域检测数据获取
在客户端发起请求并建立连接后,开始数据传输,传输方式为以下规则。
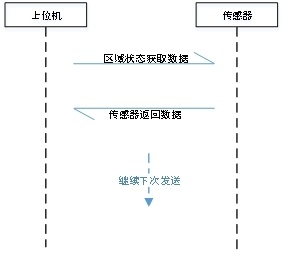
获取数据发送报文
| 数据标识符 | 5Byte |
| 传感器工作模式 | 1Byte |
| 传感器通道值 | 1Byte |
| 智能通道选择模式下的切换角度值 | 2Byte |
| 智能通道选择模式下的切换速度值 | 2Byte |
| 通道组编号 | 2Byte |
| 无效数据数据位 | 3Byte |
| 校验位 | 2Byte |
- 数据标识符(5byte)
标识符为固定数据:0x57 0x53 0x69 0x6d 0x75此条数据功能;
- 传感器工作模式(1byte)
00:无效指令
01:通道指定模式
02:智能通道选择模式
- 传感器通道值(1byte)
控制传感器当前感应使用通道,数据范围00-63;
- 传感器通角度(2byte)
通道组模式下角度值,数据为有符号数据范围-180-180;
- 传感器通道速度值(2byte)
通道组模式下速度值,数据为有符号数据范围-300-300;
- 传感器通道组号(2byte)
控制传感器当前感应使用通道组编号,数据范围00-04;
- 无效数据(3byte)
无效数据,默认数据必须要发送0x00;
- 校验位(2byte)
数据校验位,采用modbus低位在前的CRC16校验方式。校验值又校验公式计算得出,具体计算方式详见附录。
传感器返回数据
| 数据标识符 | 5Byte |
| 传感器通道值 | 1Byte |
| 无效 | 1Byte |
| 输出状态 | 1Byte |
| 无效数据 | 1Byte |
| 故障状态 | 1Byte(H) |
| 1Byte(L) | |
| 当前温度 | 1Byte |
| 1Byte | |
| 内部电机转速 | 1Byte(H) |
| 1Byte(L) | |
| 驱动电压 | 1Byte(H) |
| 1Byte(L) | |
| 接收电压 | 1Byte(H) |
| 1Byte(L) | |
| 发送电压 | 1Byte(H) |
| 1Byte(L) | |
| 校验位 | 1Byte(L) |
| 1Byte(H) |
- 数据标识符(5byte)
标识符为固定数据:0x57 0x53 0x69 0x6d 0x75此条数据功能;
- 当前通道值(1byte)
传感器当前通道值;
- 无效数据(1byte)
无效数据;
- 输出状态(1byte)
| Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 无效 | OUT3 | OUT2 | OUT1 | ||||
与参数设置项传感器输出逻辑相关:
常闭方式(默认)
00:检测到物体;
01:未检测到物体
常开方式
01:检测到物体;
00:未检测到物体;
- 无效数据(1byte)
无效数据;
- 传感器故障状态(2byte)
| ||||||||||||||||||||||||||
传感器故障代码
|
- 当前温度(2byte)
| ||||
| 有符号数据,数据范围-5000-10000;显示当前传感器内部温度,温度单位0.01℃,;当监控温度超过80.00℃传感器提示过温保护; | ||||
- 内部电机转速(2byte)
| ||||
| 无符号数据,数据范围0-3000,显示当前传感器内部电机转速,转速单位1r/min; | ||||
- 驱动电压(2byte)
| ||||
| 无符号数据,数据范围0-1600;显示当前传感器驱动电机电压,电压单位0.01V; | ||||
- 接收板电压(2byte)
| ||||
| 无符号数据,数据范围0-25000;显示当前传感器接收板ADP电压,电压单位0.01V; | ||||
- 发送板电压(2byte)
| ||||
| 无符号数据,数据范围0-5500;显示当前传感器发送板电压,电压单位0.01V; | ||||
- 校验位(2byte)
数据校验位,采用modbus低位在前的CRC16校验方式。校验值由校验公式计算得出。
cBuffer:计算CRC校验码的数组。
iBufLen:该数组的长度。
unsigned int CRC_Verify(unsigned char *cBuffer, unsigned int iBufLen)
{
unsigned int i, j; //#define wPolynom 0xA001
unsigned int wCrc = 0xffff;
unsigned int wPolynom = 0xA001;
/*---------------------------------------------------------------------------------*/
for (i = 0; i < iBufLen; i++)
{
wCrc ^= cBuffer[i];
for (j = 0; j < 8; j++)
{
if (wCrc &0x0001)
{ wCrc = (wCrc >> 1) ^ wPolynom; }
else
{ wCrc = wCrc >> 1; }
}
}
return wCrc;
}
针对客户使用在ROS环境下使用传感器,可以使用特定提供的驱动。ROS驱动包可以按照以下方式获取;
当传感器出现无法正常工作,或者无法确定传感器状态,对照以下表格进行故障诊断和确认。
激光传感器通过LED灯闪烁提示故障状态:
| LED闪烁(次数) | 故障说明 |
| 0 | 传感器正常状态 |
| 1 | 传感器编码器信号错误 |
| 2 | 无接收板信号 |
| 3 | 内存数据错误 |
| 4 | 连接错误 |
| 5 | 仿真错误 |
| 6 | 过温保护 |
| 7 | 发送欠压保护 |
| 8 | 发送过压保护 |
| 9 | 驱动欠压保护 |
| 10 | 驱动过压保护 |
| 11 | 接收欠压保护 |
| 12 | 接收过压保护 |
9.1 质保期限
*传感器提供限期质保,质保期间因产品本身质量问题或设计缺陷等原因造成不能正常使用的,我们将免费进行售后维护。
*保固期:自出售起2年。
*产品在质保期内,属于质保条件范围内的,我们将免费进行维修或者更换
*本产品质保及售后只限在中国大陆境内;
*由于运输途中造成的产品开箱无法正常使用;
*产品本身元器件损坏造成的无法正常工作;
*产品设计缺陷造成无法正常使用;
9.3 免责范围
*产品在使用过程中请注意以下条件范围内,我们将不提供无偿售后和质保。
*未正确按照说明书安装产品,造成产品损坏;
*在不适合的环境和条件下使用本产品,造成产品损坏;
*因不按产品说明书规范操作导致产品的损坏;
*未经本公司允许,擅自拆解或维修产品;
*自然灾害,火灾等不可抗拒的外界力造成的产品损坏。
9.4 技术支持
如果出现无法排除的故障,请按照以下方式联系。
电话:+86-757-22218956
电子信箱:lixianjiao@hinson-xs.com
公司网站:www.hinson-xs.com
制造商:广东兴颂科技有限公司
目录
上一页
下一页

兴颂
广东兴颂科技有限公司
工业自动化传感控制解决方案提供商
支持客户成为行业领先者
微信公众号
业务咨询
服务热线
总部:广东省佛山市顺德区杏坛镇顺业东路33号盛越园8栋
(顺德机械产业园)